Podeljen mednarodni patent za avtomatsko 3D učenje robotskega sistema za lasersko daljinsko obdelavo
11. maja, 2020 10:16 | admin | Novice
Matija Jezeršek, Janez Možina in Janez Diaci s Fakultete za strojništvo ter Hubert Kosler s podjetja Yaskawa Slovenija so kot prvi na svetu razvili sistem in metodo za avtomatsko tri-dimenzionalno učenje robotskega sistema za lasersko daljinsko obdelavo, za kar so prejeli mednarodni patent EP3124163 (B1).
Sistem za daljinske laserske obdelave omogoča adaptivno lasersko spajanje, rezanje ali teksturiranje in sodi med najhitreje razvijajoče se napredne izdelovalne tehnologije, saj nudijo izjemno natančno, hitro in fleksibilno proizvodnjo izdelkov najzahtevnejših oblik in materialov. Tovrstne tehnologije se uveljavljajo zlasti na področjih masovne proizvodnje avtomobilskih delov, elektronike in bele tehnike. Pri maloserijskih in kupcu prilagojenih proizvodih pa zaenkrat bistveno manj predvsem zaradi neekonomičnosti povezane z časovno potratno pripravo sistema – učenja obdelovalne trajektorije. To velja zlasti v primerih kompleksnih oblik, kjer je potrebno obdelovalno trajektorijo popisati z velikim številom točk. Prav omenjeno slabost izum učinkovito odpravlja.
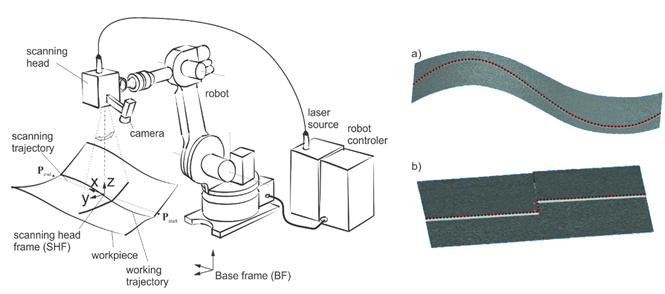
Centralni del patentirane rešitve predstavlja robotska roka z lasersko skenirno glavo. Prva omogoča veliko delovno območje (običajno 2000 x 2000 x 2000 mm), druga pa visoko hitrost (do 1000 mm/s) vodenja laserskega snopa. Določevanje obdelovalne trajektorije se izvaja samodejno na osnovi laserske triangulacije, za kar se uporablja ista skenirna glava, kot pri kasnejši obdelavi. Sistem najprej izmeri 3D obliko obdelovanca, iz katere se določi lege značilnih robov oziroma stikov obdelovanca, ki predstavljajo osnovo za zapis obdelovalne trajektorije. Tako določena trajektorija je bistveno natančnejša v primerjavi s klasičnim, vizualnim načinom. Predvsem pa je skrajšan čas učenja sistema z nekaj ur, na le nekaj sekund.
Patent je dostopen na: