International patent granted for Automatic 3D Teaching of a Robotic System for Remote Laser Processing
11. May, 2020 9:46 | admin | News
Matija Jezeršek, Janez Možina and Janez Diaci from the Faculty of Mechanical Engineering and Hubert Kosler from Yaskawa Slovenia were invented a system and method for automatic three-dimensional teaching of a robotic system for remote laser processing, for which they received international patent EP3124163 (B1)
The remote laser processing system enables adaptive laser joining, cutting or texturing and is one of the fastest-growing advanced manufacturing technologies, as they offer extremely precise, fast and flexible products production of the most demanding shapes and materials. Such technologies are particularly popular in mass production of automotive parts, electronics and home appliance. But the current solutions are uneconomical in the case of small series and customized products mainly due to the time-consuming programing of the system – learning the machining trajectory. This is particularly true in cases of complex shapes, where the machining trajectory needs to be described with a large number of vertices. This invention effectively eliminates particularly this disadvantage.
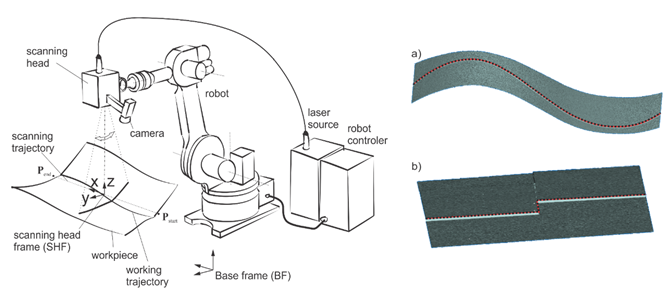
The central part of the patented solution is a robotic arm with a laser scanning head. The first allows a large working range (usually 2000 x 2000 x 2000 mm) and the second a high guiding speed (up to 1000 mm / s) of the laser beam. The determination of the machining trajectory is performed automatically based on laser triangulation, for which the same scanning head is used as for subsequent machining. The system first measures the 3D shape of the workpiece, from which the positions of the characteristic edges or contacts of the workpiece are determined. These represent the basis for recording the machining trajectory which is significantly more precise compared to the classical, visual determination. Above all, the system teaching time is shortened from a few hours to just a few seconds.
The patent is available at: