
SLAM capability development
- Post by: Lampa
- 14.07.2020
- Comments off
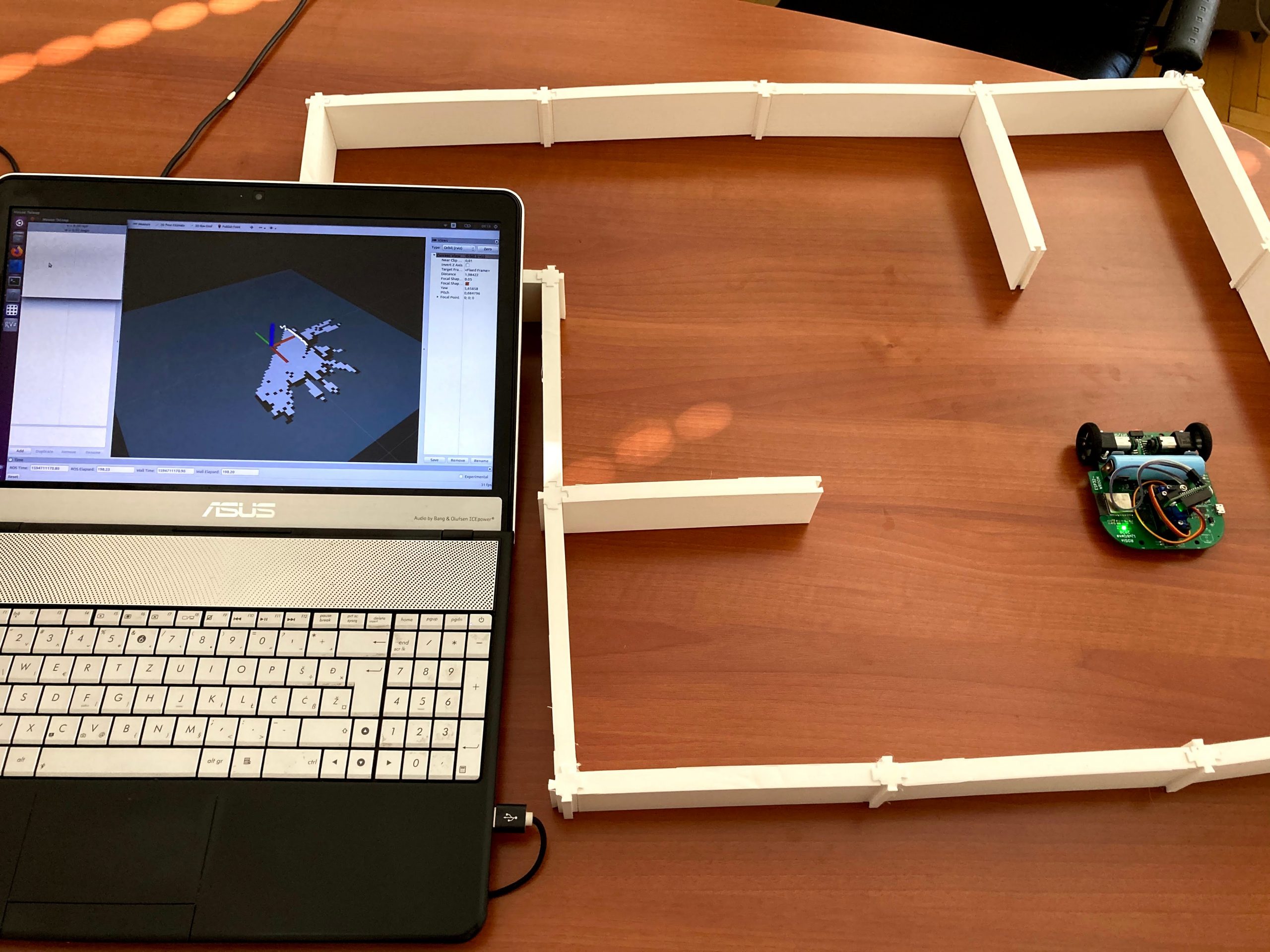
SLAM – Simultaneous Localisation and Mapping – is the ability of a system to simultaneously create maps of its environment and to track its location within it. In mobile robotics, this is one of the fundamental, but very difficult problems. Luckily, ROS provides a few ready-to-go algorithms for this task.
Currently, our robot’s basic firmware is complete, but needs some fine tuning to provide very accurate information that is required by the ROS SLAM system. The first results are very promising, and we are looking forward to fully utilise the SLAM capabilities, despite the very low-cost distance sensor.
In our next step, we will look into using the map for navigation purposes with the final goal of a fully autonomous robot. Stay tuned.
Categories: ROSin Ljubljana