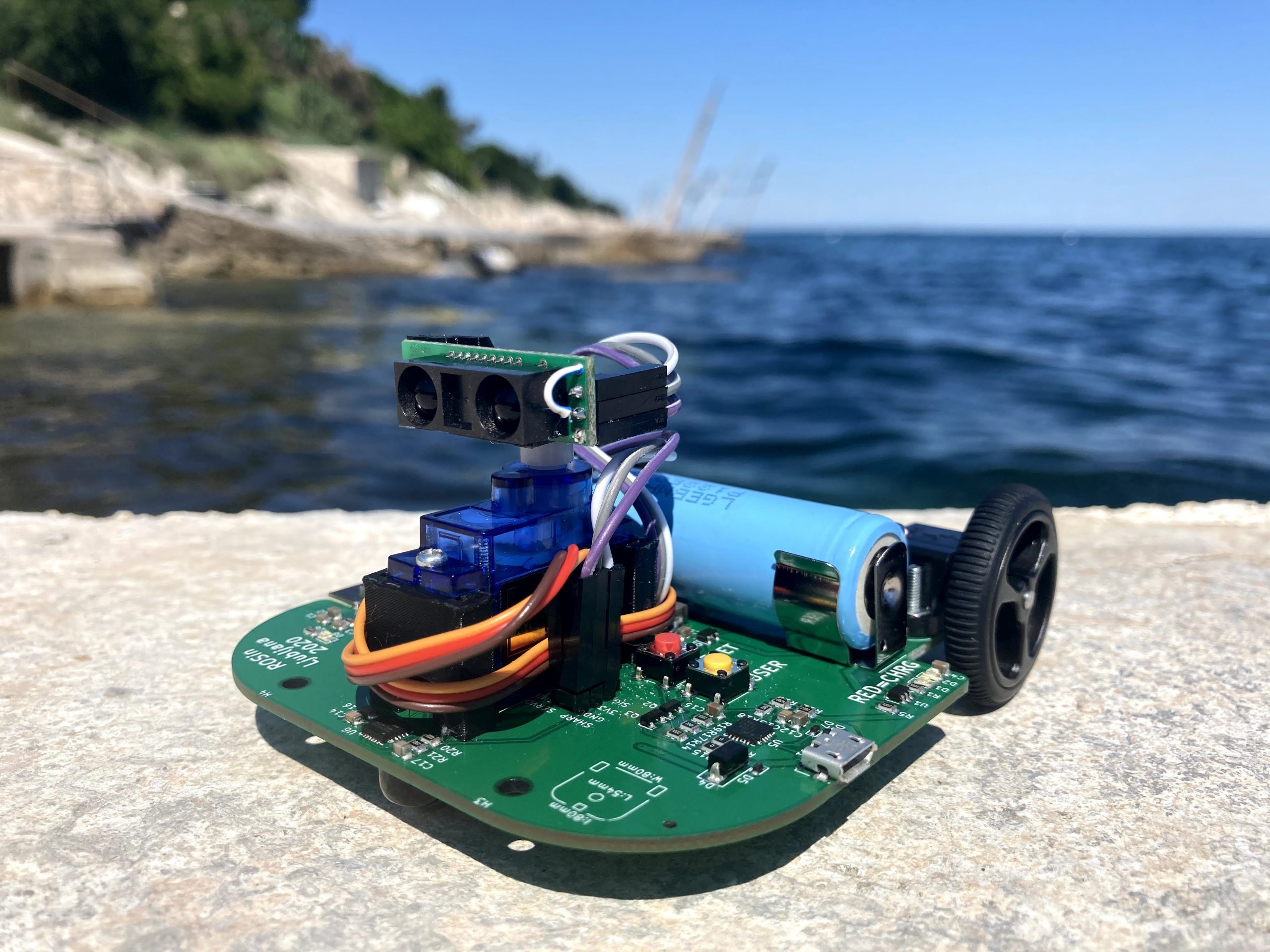
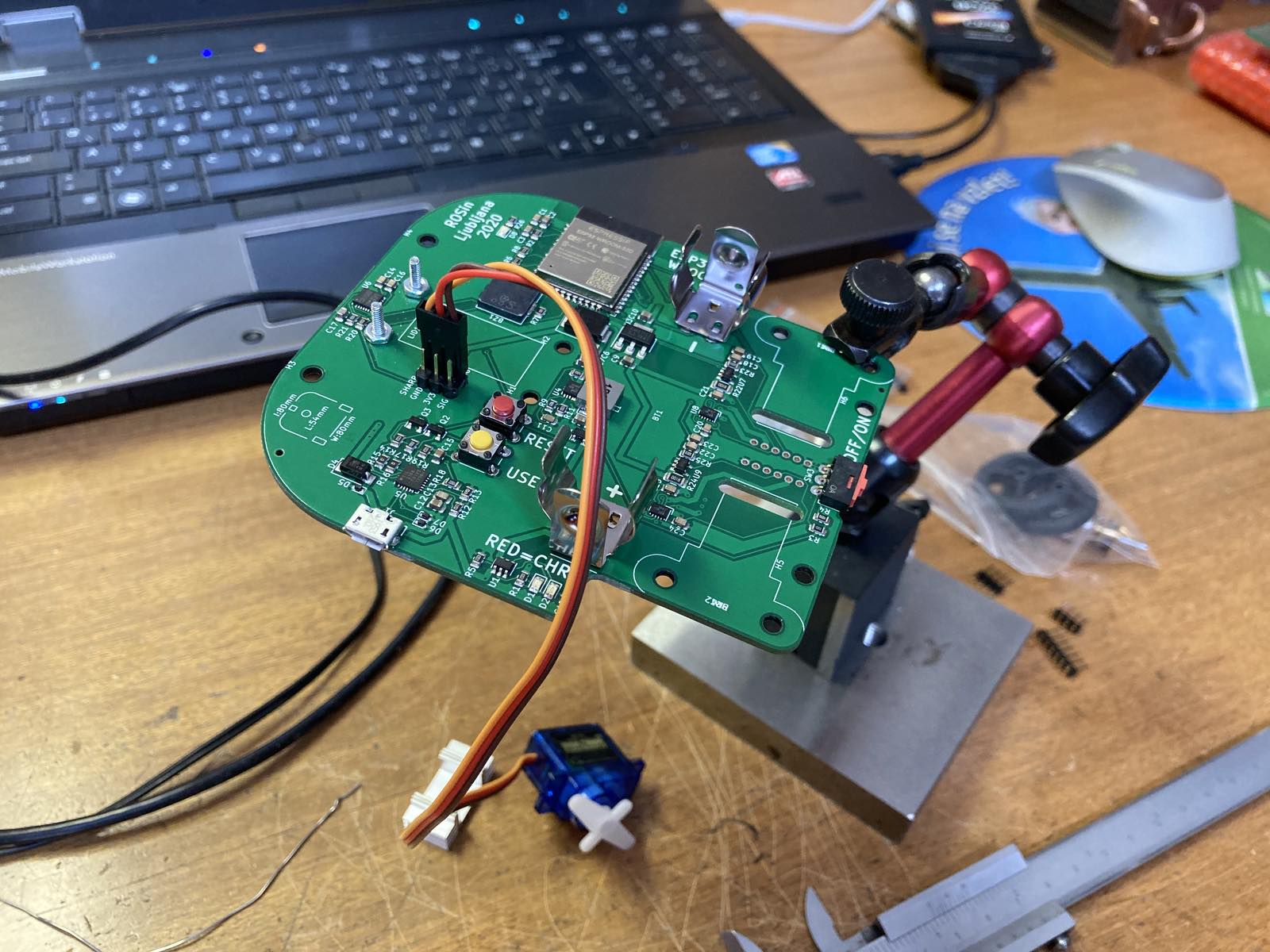
SLAM – Simultaneous Localisation and Mapping – is the ability of a system to simultaneously create maps of its environment and to track its location within it. In mobile robotics, this is one of the fundamental, but very difficult problems. Luckily, ROS provides a few ready-to-go algorithms for this task. Currently, our robot’s basic firmware […]
Read More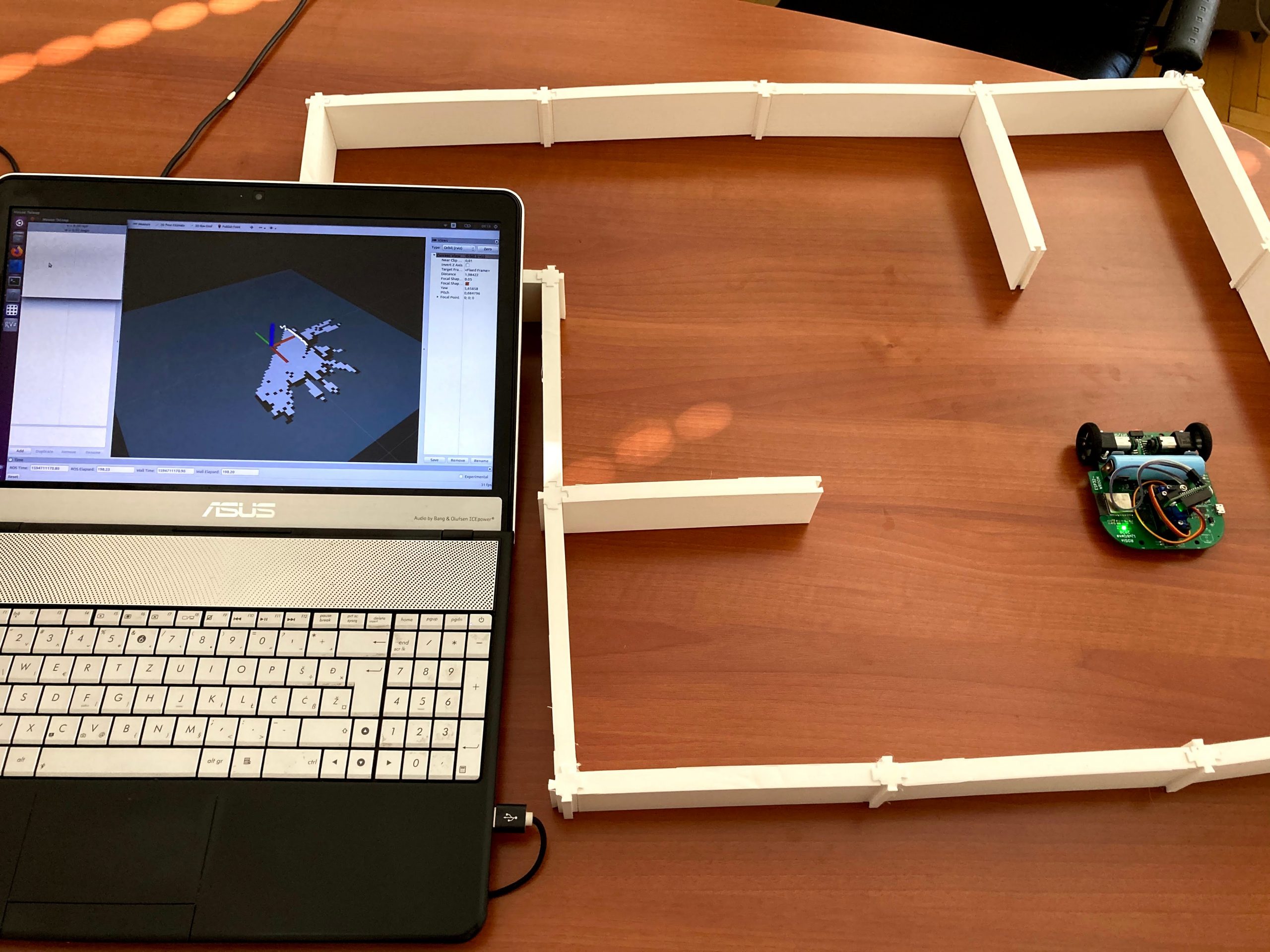
SLAM capability development
- 14.07.2020
- Comments off