Exploring Lorenz Parameters space
Contents
- origin stable node (0 < r < 1)
- origin unstable (saddle point) - two additional stable fixed points C+ and C- (1 < r < rH=24.74)
- transient chaos (13.9 < r < 24.06)
- coexistence of fixed point and chaotic attractor (24.06 < r < rH=24.74)
- chaos poure (rH=24.74 < r < 28)
- periodic windows in (28 < r < 313)
- periodic solution at r=350
close all; clear;
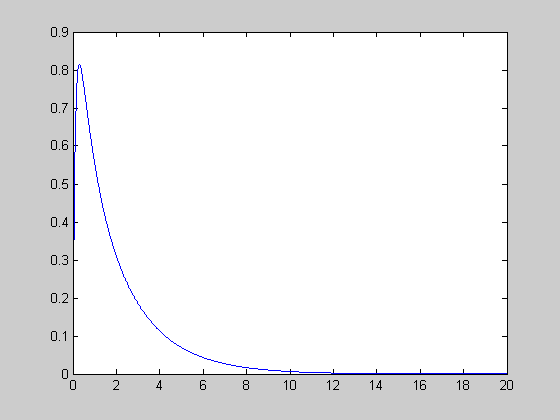
origin stable node (0 < r < 1)
check initial conditions [0.0 1.0 1.0], [0.0 1.0 -1.0]
r=0.5; [t,y]=ode45(@lorenz,[0:0.01:20],[0.0 1.0 0.0],[],r); figure(1); plot(t,y(:,1)); figure(2); plot(y(:,1),y(:,3));
origin unstable (saddle point) - two additional stable fixed points C+ and C- (1 < r < rH=24.74)
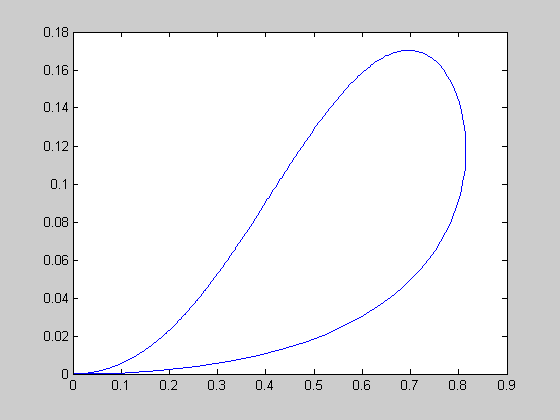
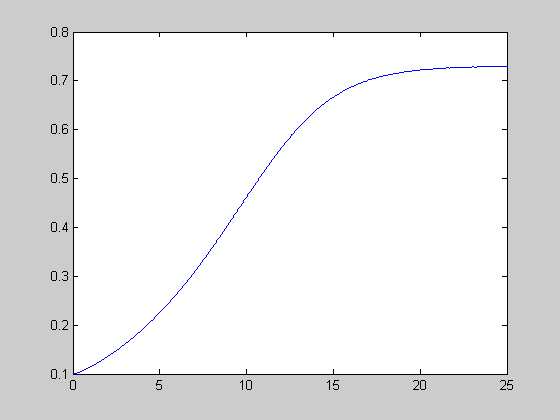
C+ and C- stable nodes (1 < r < 1.346)
r=1.2; [t,y]=ode45(@lorenz,[0:0.01:25],[0.1 0.1 0.1],[],r); figure(1); plot(t,y(:,1)); figure(2); plot(y(:,1),y(:,3));
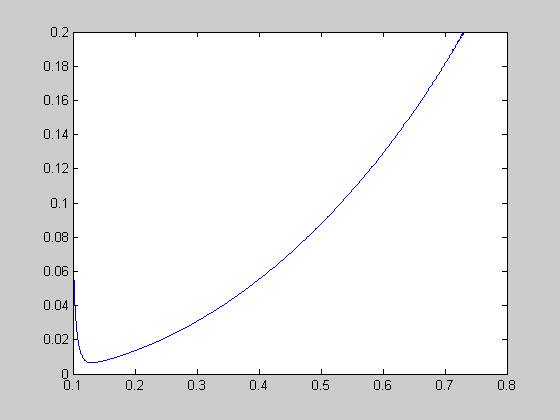
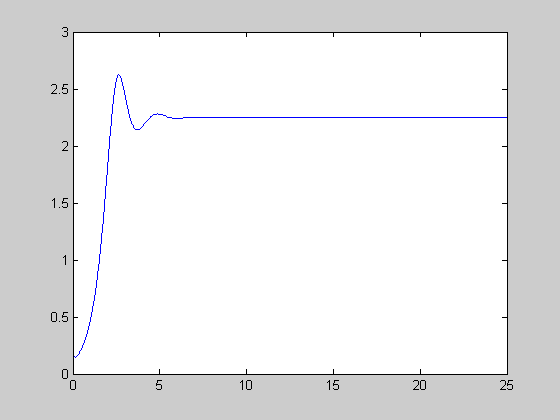
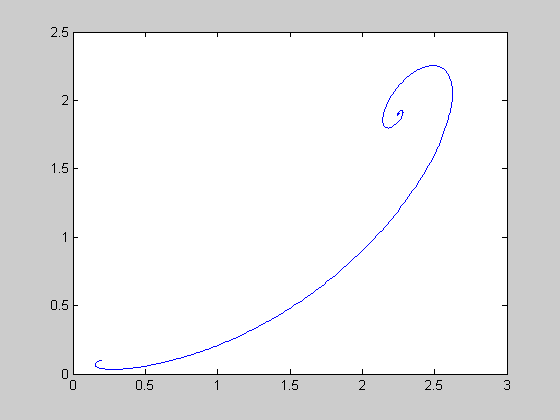
C+ and C- stable spirals (1.346 < r < 13.926) initial [-0.4 0.1 0.1],[-0.41 0.1 0.1]
r=2.9; [t,y]=ode45(@lorenz,[0:0.01:25],[0.2 0.1 0.1],[],r); figure(1); plot(t,y(:,1)); figure(2); plot(y(:,1),y(:,3));
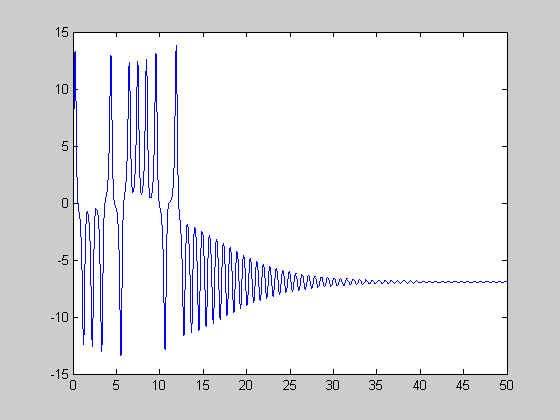
transient chaos (13.9 < r < 24.06)
initial [5 5 4.1], [5 5 4.11]
r=19; [t,y]=ode45(@lorenz,[0:0.01:50],[5 5 4.1],[],r); figure(1) plot(t,y(:,1)); figure(2) plot(y(:,1),y(:,3));
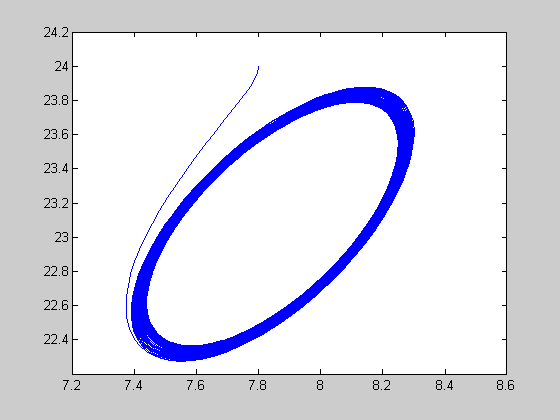
coexistence of fixed point and chaotic attractor (24.06 < r < rH=24.74)
close to fixed point
r=24.08; [t,y]=ode45(@lorenz,[0:0.01:100],[7.8 7.8 24],[],r); figure(1) plot(t,y(:,1)); figure(2) plot(y(:,1),y(:,3));
chaos
r=24.08; [t,y]=ode45(@lorenz,[0:0.01:100],[5 5 4],[],r); figure(1) plot(t,y(:,1)); figure(2) plot(y(:,1),y(:,3));
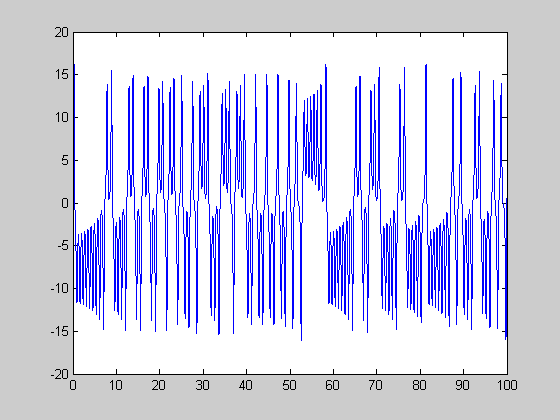
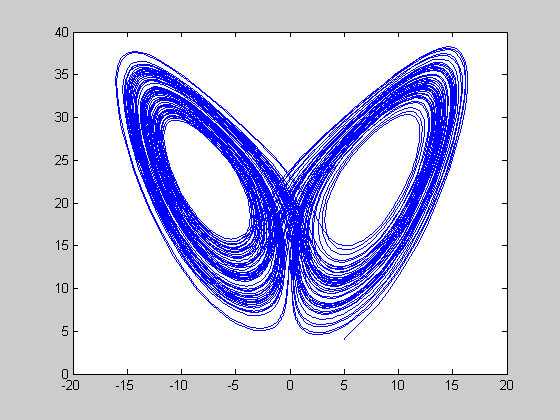
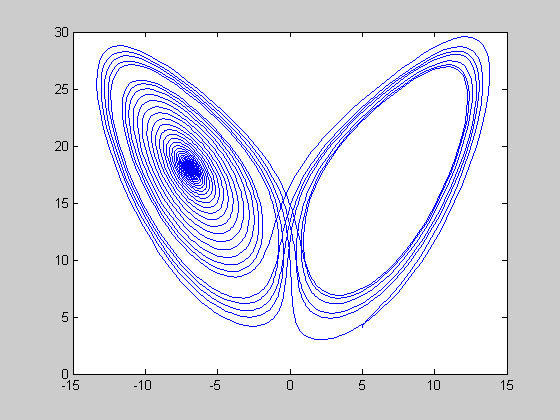
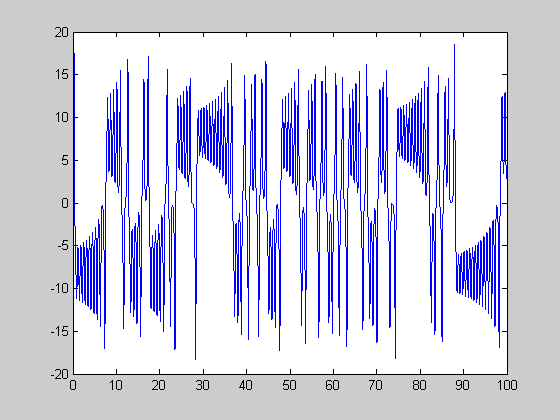
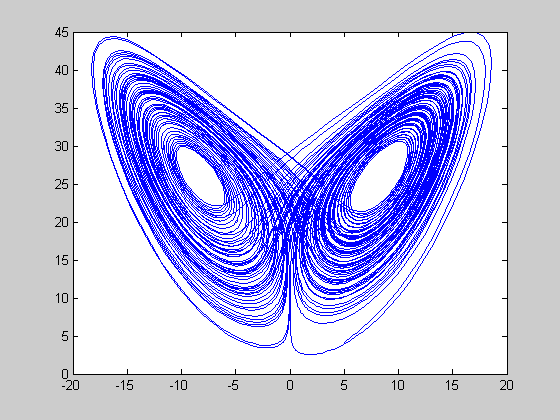
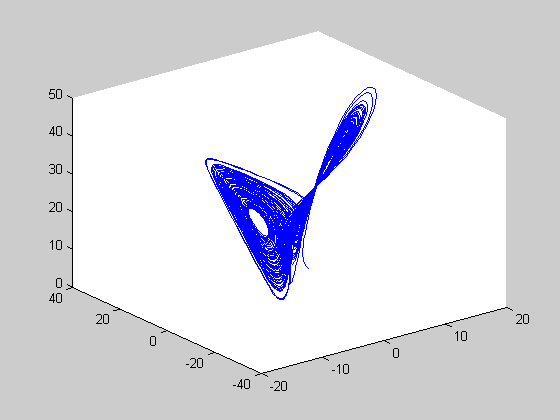
chaos poure (rH=24.74 < r < 28)
r=27; [t,y]=ode45(@lorenz,[0:0.01:100],[5 5 4],[],r); figure(1) plot(t,y(:,1)); figure(2) plot(y(:,1),y(:,3)); figure(3) plot3(y(:,1),y(:,2),y(:,3));
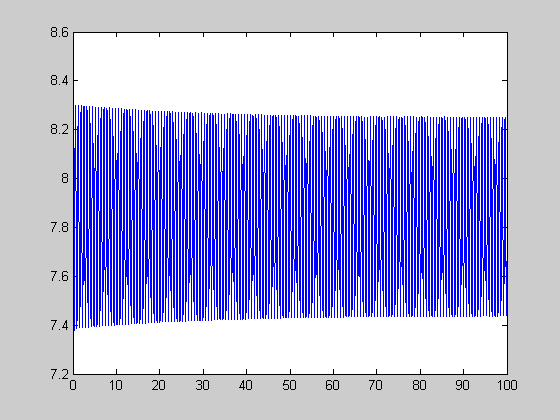
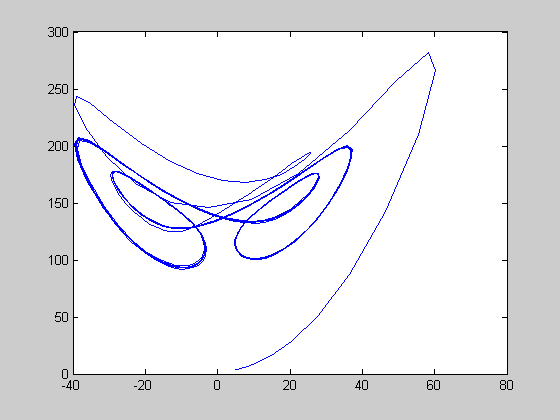
periodic windows in (28 < r < 313)
99.524..< r 100.795...
r=100.0; [t,y]=ode45(@lorenz,[0:0.01:25],[5 5 4],[],r); figure(1) plot(t,y(:,1)); figure(2) plot(y(:,1),y(:,3));
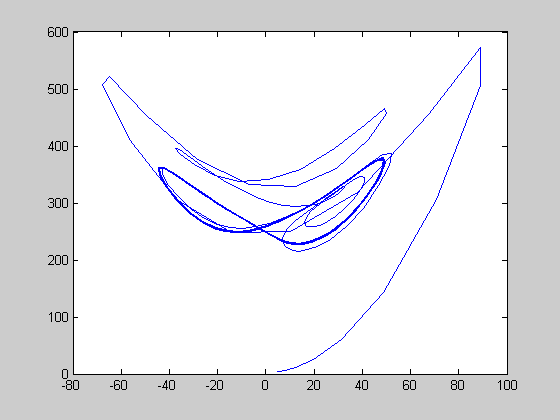
145 < r < 166
r=150.0; [t,y]=ode45(@lorenz,[0:0.01:15],[5 5 4],[],r); figure(1) plot(t,y(:,1)); figure(2) plot(y(:,1),y(:,3));
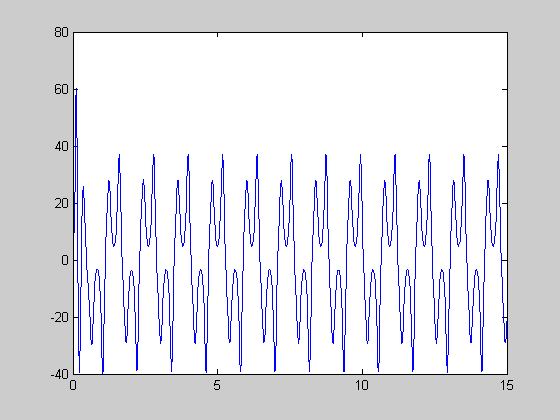
214.4 < r < 313
r=300.0; [t,y]=ode45(@lorenz,[0:0.01:15],[5 5 4],[],r); figure(1) plot(t,y(:,1)); plot(y(:,1),y(:,3)); figure(2)
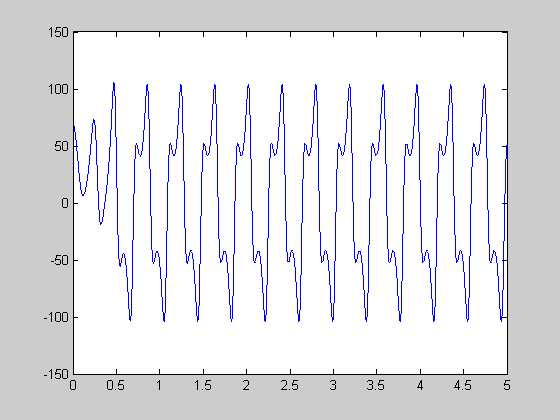
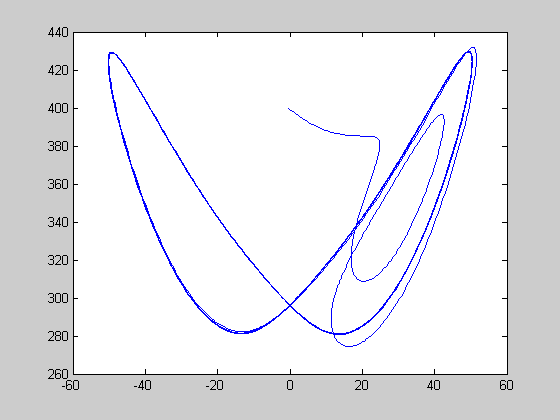
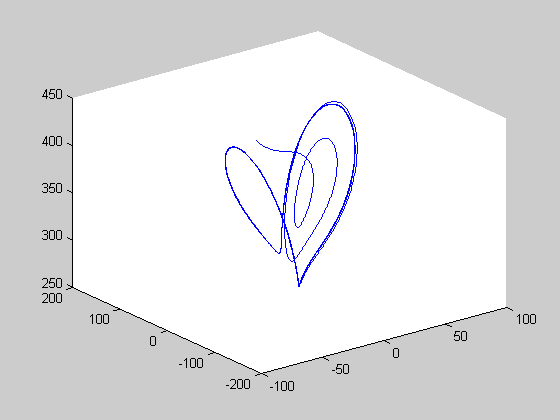
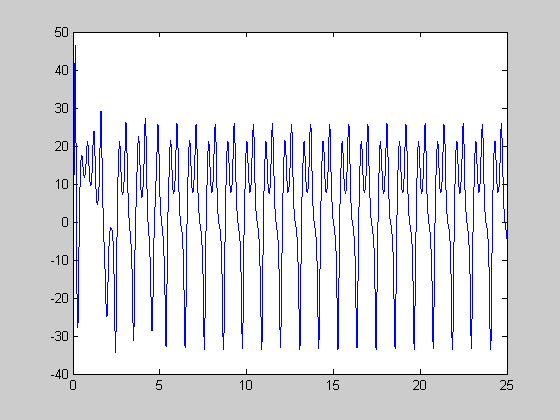
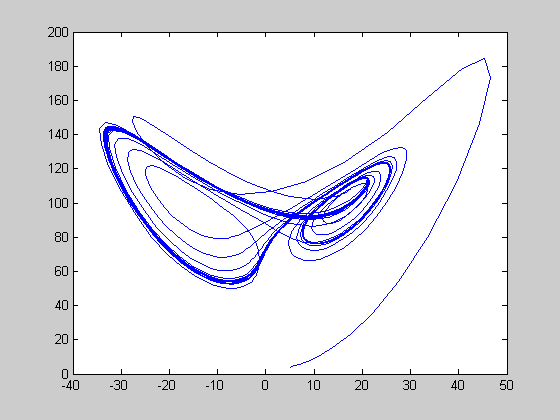
periodic solution at r=350
313 < r [5 5 400], [-5 5 400], [-5 5 450]
r=350.0; [t,y]=ode45(@lorenz,[0:0.001:5],[-0.5 70 400],[],r); figure(1) plot(t,y(:,2)); figure(2) plot(y(:,1),y(:,3)); figure(3); plot3(y(:,1),y(:,2),y(:,3));